

 25 流れのままに / 天雷无妄(てんらいむぼう)
25 流れのままに / 天雷无妄(てんらいむぼう)

※ 破壊のあとに建設が始まる。復興である。「復」は冬至を示す。
※ 无は無、妄は望、こうしたいという則行や予定、下心や手練手管
を拾てて、なりゆきのままに身を、ゆだねることである。老子の
無為自然の辺に近い。無望とはまた、思いもかけぬこと、予期せ
ぬことである。天の摂理に身をまかせ、思いがけない出来事にぶ
つかっても、動揺したり、作為を慟かせたりしないで、静かにま
率直にそれを受け入れることだ。もちろんそれは単なる消極とは
ちがう。ひでりや洪水に見舞われても、黙々と大地と取り組んで
離れない農夫の心、苦しみに耐えて子を育てる母の態度である。
なお、栄代の学者は妄をいつわり、でたらめと解し、「无妄」と
は至誠頁実のことだと説明している。

● ひこにゃんだけじゃなく、キャッフィーもお忘れなく!
「ひこにゃん」に届いたバレンタインデーのチョコレートなどのプレゼントが14日、
彦根市役所で披露された。14日時点では過去最多の326個で総数も最多だった14
年の336個を上回る見込みだとうが、滋賀県のイメージキャラクター「キャッフィー」
は2個にとどまっている。ひこにゃんには近畿を中心に北海道から鹿児島まで27都道
府県から、手作りチョコレートやワイン、栄養ドリンクなどが届いている。
一方、キャッフィーへのチョコはわずか2個!、しかし、昨年はゼロだっただけに「チ
ョーうれしい」とコメント。ともに県のキャラクターを務める「うぉーたん」は今年も
ゼロだったという(京都新聞、2017.02.14)。ところで、この僕は?というと、いつも
の義理チョコ!と、そして、息子たちからの差出人不詳の闇チョコ!、とほほの、ホッ
ツだ!?

【RE100倶楽部:ローソンのスマートエネルギー店舗オープン】
13日、ローソンは、経済産業省の「バーチャルパワープラント構築実証事業」の一環
として、IoT(モノのインターネット)を活用した節電制御などを実現する店舗をオープ
ンすると発表。「ローソン小平天神町二丁目店」で、17日に開店し、慶應義塾大学 SFC
研究所と共同で実証実験する。バーチャルパワープラント(VPP)の技術や太陽光発電な
どを組み合わせることで、電力購入量を15年度の標準的な店舗の平均値に比べ、約6
割削減できる見込み。コンビニエンスストアで「VPP構築実証事業」の採択を受けた事業
者は、ローソンが初めて。
 fEB. 13, 2017
fEB. 13, 2017
太陽光発電システムの出力は22kW相当で、パネルは屋根に設置する。出力10kW相当
分を売電し出力12kW相当分を自家消費する。店内に容量5.6kWhの蓄電池システムを
設置、太陽光発電電力の充放電などを行う。スマートハウス向けの通信プロトコルであ
る「ECHONET Lite」に対応し、遠隔で制御する。節電にも活用できる。このほか、LE
D照明、自然循環換気、床下吸気による地熱利用、換気トップライト(太陽光を取り入
れてLED照明と連動させる照明方法)といった省エネ効果の高い設備を導入する。これ
らの設備にIoTを導入し、節電量の算出やエネルギーの一括制御に生かす。
ローソンでは08年以降、創エネ設備や省エネ技術を導入し、実験・検証を進めてきた。
この成果を生かし、既存店舗に太陽光発電システムやLED照明、二酸化炭素冷媒による冷
凍・冷蔵機を導入している。既存店への太陽光発電システムの導入では、屋根上に出力
12kW相当の太陽光パネルを並べ、10kW相当を売電、2kW相当を店舗で自家消費して
いる。12年に着手し、17年1月末時点で約2千店舗に設置ずみ。
【省エネ倶楽部:空気ヒートポンプで90℃の熱風供給を実現】
13日、三菱重工サーマルシステムズらは、工場における乾燥工程などでは、化石燃料
による蒸気ボイラーや熱風発生装置などが広く使われており、ヒートポンプによる省エ
ネが望まれている。一方、従来の高温ヒートポンプの多くは、工場の廃温水から熱回収
する水熱源ヒートポンプまたは温水生成ヒートポンプのため、冷温水を循環させる配管
や空気熱交換器を設置する必要があり、コストやスペースの面で課題。
 Feb. 13, 2017
Feb. 13, 2017
熱Pu-tonは、家庭用のルームエアコンと同様に、大気から熱を取り込む室外機と、熱風
を直接生成する室内機から構成される空気熱源ヒートポンプ。2個の圧縮機を直列接続
し、圧縮機の仕事を分散することで損失を軽減し、高効率な熱風供給運転を可能にした。
また、吹き出し温度を低下させないよう圧縮機回転数を制御することで、冷媒配管長を
最大片道50メートルまで対応。
事例:フィルムを貼り合わせるドライラミネーターに適用した実証試験では、工場内の
分散配置による配管ロスの低減により、集中配置が必要な蒸気加熱システムと比べてラ
ンニングコストを約5割、エネルギー消費量を約6割、二酸化炭素排出量を約5割削減。

【RE100倶楽部:スマート風力タービンの開発 25】
● 事例研究:特開2017-031920 垂直型風力発電システム、
及び垂直型風力発電システムにおける制御方法Ⅲ
● コンパクトでスマートに環境と融和
昨日は、 意匠性と機能性を調和させた、"Think Globally Act Locally"で革命的な「ウイン
ド・タービン・ポール」として世界展開する絵を描いてみたが、その新規考案事例を掲
載してみよう(下図「特開2017-015792 避難誘導用注意喚起装置」参照)。垂直型風力
発電街塔(=ウインド・タービンポール)の意匠特性は、①できる限りスリムなものに
し、死角や物陰を作らない(防犯性)。②反対に、交通事故予防などを配慮しポールは
視界に目立たなければならない(視認性・安全性)、③そして、町並みのなどの景観を
損なわない(環境融合性)が前提となる。したがって、、風力発電装置の①ブレード、②
アームや③集風道はコンパクトに設計し、風況に合わせ、水平方向に、拡張(あるいは
収縮)するものは不適合なため、固定支持されたものでなkればならない。
従って、これらの機能を構成する素材は、既存の金属や合金とはことなり、軽くて、よ
り機械的強度が大きく、しなやかな素材でなければなら。さらに、ウインド・タービン
岳でなくポール自体も同じような特性をもつ素材を選択する必要があるが、これについ
てはまた後日取り上げる、 Jan. 19, 2017
Jan. 19, 2017
【符号の説明】
1 ブレード 11 平面 2 基台 3 風力発電機 31 蓄電装置 4 蓄光板 5
紫外線光源 6 可視光線光源 7 光源スイッチ 8 太陽光発電機
なお、上図は、複数のブレード1を基台2に等間隔かつ対称的に起立固定、風力を受け
て縦軸回りに回転、このトルクにより風力発電機3で発電可能にし、この電力を蓄電装
置31に蓄電し、一方、ブレード1の表面には、蓄光材を担持する蓄光板4を止着。基台
2には、蓄電装置31から電力が供給される紫外線光源5を配設、この紫外線光源5で紫
外線が蓄光板4に照射され蓄光しブレード1の表面を発光するとともに、この紫外線光
源5の発光時間を、光源スイッチ7で、点滅制御する技術的手段を採用し、遠方からも
良好な視認でき、省電力で発光効率の高い避難誘導用注意喚起装置の新規提案である。
この特許を構成する風力発電機が磁気反発軸受型を採用した下図の「特開平11-159438
発電機を備えた屋外設置物」に例示されているので参考に掲載しておく。

これによると、発電機能を備えたモニュメントや看板等が風を受け回転するにはモニュ
メントの形状が重要で、風のエネルギーを効率よく回転エネルギーに変換出来る形状で
あること、ひいては発電効率が高くする。従来の風力発電の羽根形状には、サボニウス
型、ダリウス型、パドル型を基本ベースにした形状で、より高い受風効率を得ることが
出来、モニュメントの回転はモニュメントの役割を果たすために、①低速で回転が必要
であり、例えば、②15rpmでも十分な発電が出来、②発電機との間に増速機を連結
し、③効率よく発電するには1000rpm~2000rpmで回転し、④そのために
100倍以上の増速が必要で、⑤発電機はモニュメントの回転速度が一定以上に達した
段階で回るように、カップリングを増速機との間に介在させるものとある。この構成、
構造についてはまた別の機会で触れることにする。
● 実施形態1
さて、昨日につづいて、「特開2017-031920 垂直型風力発電システム、及び垂直型風力
発電システムにおける制御方法」の「実施形態1」をみてみよう。
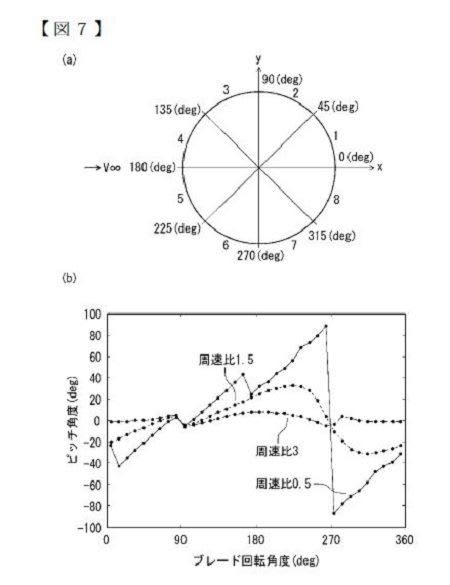
上図7は実施の形態1に係る垂直型風力発電システム15に搭載する回転角度テーブル
14の一例を示した図である。図7(a)はブレード回転角度13を分割した参考図で
あり、この場合360度を8等分し、それぞれのゾーンごとに最適な相対角度8の演算
を行う。図7(b)はゾーンの分割数を増やして相対角度8を演算した回転角度テーブ
ル14の一例を示した図であり、風速16が12m/sとした時の各周速比におけるピ
ッチ角度39の回転角度テーブル14の一例を示す。
回転角度テーブル14は、垂直型風力発電システム15の回転エネルギー変換効率を向
上させるために、迎角38、相対角度8またはピッチ角度39、ブレード回転角度13
周速比および風速16との関係を表したもので、横軸にブレード回転角度13、縦軸に
相対角度8、迎角38またはピッチ角度39を配して、周速比および/または風速毎の
複数の情報をマッピングデータ化した、グラフ、表などのデータ情報を示したものであ
る。
比較的回転数が低い周速比0.5の状態では比較的回転数が高い周速比3の状態に比べ
て、回転エネルギー変換効率(Cp)が最大となるピッチ角度39(相対角度8)の値
は大きく変化させる必要がある。このように、Cpを最大とする相対角度8、迎角38
およびピッチ角度39は、周速比により大きく変化し、周速比が大きい場合と比較し、
周速比が小さい場合の方が角度の変化量が大きくなる。
なお、風速は0m/sから最大100m/sの範囲を想定し、相対角度8は90度を基
準に調整範囲を±180度としている。ここで、特に周速比0.5の場合の270度付
近において、Cpが最大となるピッチ角度39は+80度から-80度へ大きく変化す
るが、エネルギー変換効率変化量(ΔCp)を定義して、ΔCpによるエネルギー改善
効果と回転に必要となるエネルギーを考慮し、そのメリットがあればピッチ角度39を
調整してもよいし、ΔCpの改善効果が低いようであれば、ピッチ角度39の変化量が
小さくなる回転角度テーブル14としても良い。ここで、垂直型ブレード1のパワーP
(出力 W)は、回転トルクQ(Nm)と回転角速度ω(rad/sec)の積でありP=Qω
という関係がある。
回転角度テーブル14の算出は、平面座標系11において垂直型ブレード1に流入する
風の風速16、垂直型ブレード1の翼直径26、翼型の風速またはレイノルズ数および
迎角38に対する揚力特性および抗力からなる翼型特性(図5参照)、垂直型ブレード
1の回転数または周速比、翼弦25の長さとなる翼弦長29、直線翼2の翼枚数および
翼直径26から演算されたソリディティー(翼直径26における円周の長さと翼弦長29
×翼枚数の比率)、垂直翼2の全長となる翼長34、および基準角度12からの垂直型
ブレード1または直線翼2の回転角度となるブレード回転角度13のすべての数値また
はいずれか一つ以上の数値から演算される。
この時、上記の各々の情報がすべてあれば精度のよい回転角度テーブル14を作成でき
るが、翼長34は基準長さで代用(演算)すれば回転角度テーブル14は算出可能であ
り、翼全体の回転エネルギーは計算できないが、相対的な値は算出可能となるため、回
転角度テーブル14の算出に翼長34は必須ではない。また、風速16および周速比は
平均的な値を代入することで、回転角度テーブル14の大まかな形を算出することは可
能である。
回転角度テーブル14はあらかじめ計算しておいても良いし、リアルタイムで計算する
構成でもよい。あらかじめ計算しておく場合には、少なくとも迎角38、相対角度8ま
たはピッチ角度39、ブレード回転角度13、周速比および風速16との関係をデータ
セットの形で備えておき、風速検出手段17、回転数検出手段18、風向検出手段19
による検出結果を参照して、ブレード回転角度13に応じた迎角38、相対角度8また
はピッチ角度39を読み出すことができる。具体的には、回転角度テーブル14はコン
ピュータの記憶手段に格納し、各検出手段17,18,19の検出結果をコンピュータ
に入力することで、読み出しが実現される。一方、リアルタイムで計算する構成では、
翼直径26や上記ソリディティー(solidity)の値などは予め備えたものを用い、風速検
出手段17、回転数検出手段18、風向検出手段19による検出結果をコンピュータの
演算手段に入力し、ブレード回転角度13に応じた迎角38、相対角度8またはピッチ
角度39を算出することができる。

以下、図面および数式を用いて、その概要を説明する。
二重アクチュエータ多流管モデルによる風車特性計算の概要を説明する。二重アクチュ
エータ多流管モデルでは、図19に示すような複数の流管を設定する。そして、図20
に示すようにブレード回転円と各流管が交差する上流側および下流側それぞれの位置に
アクチュエータ面を仮想し、各流管に対して翼素運動量理論を適用する。
なお、図20中において p∞ : 垂直型風車上下流の一様流および風車内の圧力(大気圧)
R : アーム長(ブレード回転半径)
A∞ : 流管s 入口面積
V∞ : 流管s 入口の風速(一様流風速)
Au : 流管s の上流側アクチュエータ面における断面積
Vu : 流管s の上流側アクチュエータ面における風速
p+u : 流管s の上流側アクチュエータ面上流側における圧力
p-u : 流管s の上流側アクチュエータ面下流側における圧力
Aa : 流管s の風車内における断面積
Va : 流管s の風車内における風速
Ad : 流管s の下流側アクチュエータ面における断面積
Vd : 流管s の下流側アクチュエータ面における風速
p+d : 流管s の下流側アクチュエータ面上流側における圧力
p-d : 流管s の下流側アクチュエータ面下流側における圧力
AW : 流管s 出口面積
VW : 流管s 出口の風速
である。



Cpを最大とする相対角度8の導出過程を図9A~Dに示す。 図9Aはゾーンごとに
Cpが最大となる相対角度8(または迎角38、ピッチ角39)を演算する過程を示し
たもので、それぞれのゾーンでCpが最大になる相対角度8を演算し、変化させていっ
た際のエネルギー変換効率改善量(ΔCp)を示した一例である。
このように、一つ前のゾーンとのCpとΔCpおよび相対角度8をとの関係を明確にす
ることで、相対角度8を調整することの効果および各ゾーンまたはブレード回転角度⑬
の変化に対する相対角度8の回転調整に対する必要なエネルギーを把握することができ
る。 たとえば、回転角度テーブル14は、相対角度8による回転エネルギー変換効率
(Cp)のΔCpの演算値を有し、垂直型ブレード1が1回転する間の相対角度8の変
化量を必要最小限とするために、ΔCpがあらかじめ指定した値より低い相対角度8お
よび回転角度テーブル14のゾーンまたはブレード回転角度13では相対角度8の調整
を行わないまたは、ΔCpと相対角度8との変化量を比較し、ΔCpの改善量に見合う
効果が無い場合は相対角度8の変化量を少なくするような回転角度テーブル14とする
ことも可能となる。
この時、ΔCpと相対角度8の変化量とによりその効果度合いで回転角度テーブル14
を作成しても良い。また、垂直型ブレードが1回転する間の相対角度8の変化量を必要
最小限とするために、一つ前のゾーンの相対角度8が必要最小限となるよう、ΔCpに
対し相対角度8の変化量を優先した回転角度テーブル(相対角度8の変化量最少の優先
モード)としても良い。図9Bは、周速比とCpとの計算果を示した一例で、相対角度
8を90度または93度に固定した場合のCpと、周速比2および周速比3でそれぞれ
Cpが最大になる回転角度テーブル14でのCpのカーブを示している。
この図は、周速比2および周速比3でそれぞれのCpの改善効果(ΔCp)を示してい
ることになり、それぞれの周速比および風速における最大の相対角度8の回転角度テー
ブル14を網羅し、それぞれの条件における最大のCpとなる条件で垂直型ブレード1の
回転数制御を行うことで、垂直型風力発電システム15のいわゆるパワーカーブを最も
回転エネルギー変換効率の高い状態で実現できる。
この際、風向検出手段19により検出した、平面座標系11における風向28の角度を
、回転角度テーブル14の相対角度8に加算または減算することで、あらゆる風向28
に対応した回転エネルギー変換効率に優れた垂直型風力発電システム15を実現するこ
とができる。図9Cは図8(a)に示したゾーンごとのCpの改善量の計算過程の一例
を示した図である。ピッチ角度39を調整することで各ゾーン毎にCpが大きく改善す
ることがわかる。またΔCpが大きいところは角度調整の効果が大きく、ΔCpの小さ
いところは、角度調整の効果が小さいといえる
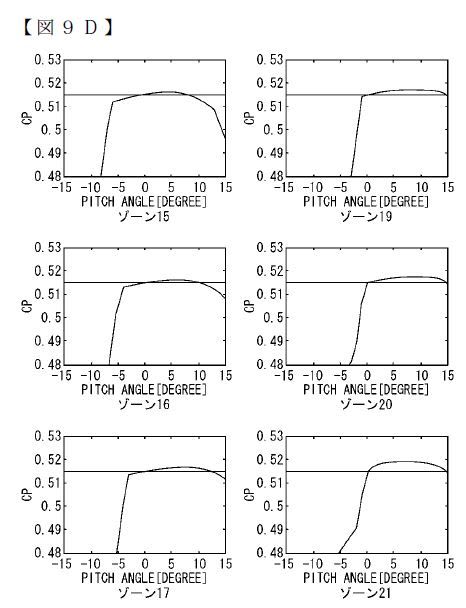
さらに、同様に図9Dはゾーン毎にピッチ角度39を調整した時のCpへの影響度合い
(ΔCp)を示している。ピッチ角度調整39によるゾーン毎のΔCpの演算結果と、
ゾーン毎のピッチ角度39の調整量によるΔCpの演算結果より、ΔCpを優先するか
ピッチ角度39の調整量を優先するかを事前に検討し、回転角度テーブル14に反映す
ることで、一層回転エネルギー変換効率と発電効率に優れた垂直型風力発電システム
15を実現することができる。
図10は直線翼2の回転角制御および垂直型ブレード1の回転数制御の動作を示した簡
易的な動作図である。直線翼2の回転角度制御は、回転角度テーブル14により相対角
度8の情報が回転角制御手段10に入り、相対角度8とするために必要な出力信号を回
動手段9の駆動源30に出力し、直線翼2をブレード回転角度13に応じた相対角度8
に設定する。
一方、垂直型ブレード1の回転数制御は、風速16に応じて発生する垂直型ブレード1
の回転エネルギーによる回転トルク20と、発電機5の負荷による回転抑止トルクを釣
り合わせることにより垂直型ブレード1の回転数を一定回転数に制御する回転数制御手
段22を有し、回転トルク20の情報と回転数検出手段18の情報が回転数制御手段22
に入り、回転数制御手段22は発電機5の回転数検出手段18に応じて発生する回転ト
ルク20に対して、発電機5の回転数検出手段18に応じて発生する電力、電圧、電流
または発電機に付加する抵抗値を変化させる回転抑止トルク可変手段21により垂直型
ブレード1の回転トルクと発電機5の回転抑止トルクを釣合わせることで、回転数を一
定に制御することが可能となる。
この際、図9Bの周速比-Cpカーブにおいて、パワーカーブにおけるピークの右側(
回転数が高い側)の回転数で釣合わせることが必須となる。ピークの右側では回転抑止
トルクを増やすことで回転数が下がるともに垂直型ブレード1の回転トルク20が増え
るため、再び回転数が増加する方向に垂直型ブレード1が回転し、回転数制御が可能と
なる。一方ピークの左側では発電機5の回転抑止トルクを増やすと垂直型ブレード1の
回転トルクが低下するとともに回転数が急速に低下するため、垂直型ブレード1は回転
数が増加することなく(回転数制御ができず)失速する。このためピークの左側の制御
領域の場合は、回転抑止トルクを一時的に減らし、ピークの右側の制御領域の回転数の
状態に復帰させることが必要となる。
従って、Cpが高くかつ安定した回転数制御を行うには、周速比に応じた回転角度テー
ブル14を用い、Cpが最大となるように常に相対角度8を角度制御する場合、周速比
(回転数)の制御ポイントは、必ず周速比はCp-周速比カーブにおいてピークの右側
とすることが必要になる。
ちょっと、めげてしましそうだが、頑張って読みすすめていくことにしましょう。
この項つづく
 ● 今夜の一曲
● 今夜の一曲
フランク:弦楽四重奏曲 ニ長調
弦楽四重奏曲 ニ長調は、セザール・フランクが1889年から1890年にかけて作曲した弦
楽四重奏曲。今日フランクの作品として知られる傑作群は1876年以降の第3期に生み出
されている。室内楽の分野にも『ピアノ五重奏曲』、『ヴァイオリンソナタ』 そして
『弦楽四重奏曲』 がこの順に生まれており、それぞれが傑出した作品として知られて
いる。フランクはこの後さらにもう1曲のヴァイオリンソナタの構想を練っていたが、
それは彼の死により断たれ、弦楽四重奏曲が最後の室内楽作品となる。
【楽曲構成】
1.第1楽章 ポーコ・レント - アレグロ 4/4拍子 ニ長調
2.第2楽章 スケルツォ: ヴィヴァーチェ 3/8拍子 嬰ヘ短調
3.第3楽章 ラルゲット 3/4拍子 ロ長調
4、第4楽章 フィナーレ: アレグロ・モルト 2/2拍子 ニ長調