

 比 : 人の和 / 水地比(すいちひ)
比 : 人の和 / 水地比(すいちひ)

※ 長い戦いのあと、人々は和気藹々と親しみあう。比は、
人が二人並んだ形の字で、親しみ助けあうことである。
卦(か)の形は地(坤:こん)の上に水(坎:かん)が
あり、両者の親和によって万物を生み育てるのである。
また、天下の位を意味する五陽(下からで五番の-)に
多くの陰(- -)が親しむ形で、指導者のまわりに人々
が慕い寄る様子を表す。寛容の気持で人に接してゆけば、
初めは紆余曲折があるが、やがて多くの人の協力を得て
大事業が完成できるのである。あるいは、多くの女性を
魅惑する男性と見ることもできる。したがって女性にと
っては容易ならぬ事態である。後(おく)るる者は凶、
とある。
【RE100倶楽部:スマート風力タービンの開発 14】
風況を選ばない高出力インテリジェント風力発電機
● フィールド実験
既存の風力発電機モデル(前段風車ロータ径2メートル)を用いたフィールド実験によって イン
テリジェント風力発電機の基本特性を把握するとともに指針を得る。このとき、高さ8メートル
の固定式タワーによる自然風下でのデータ、および車載による車速一定すなわち一定風速下(大
型風洞実験に相当)でのデータを取得する。
海に面した小高い山の中腹を選定した(福岡県北九州市若松区頓田)、現地調査に始まり、搬入
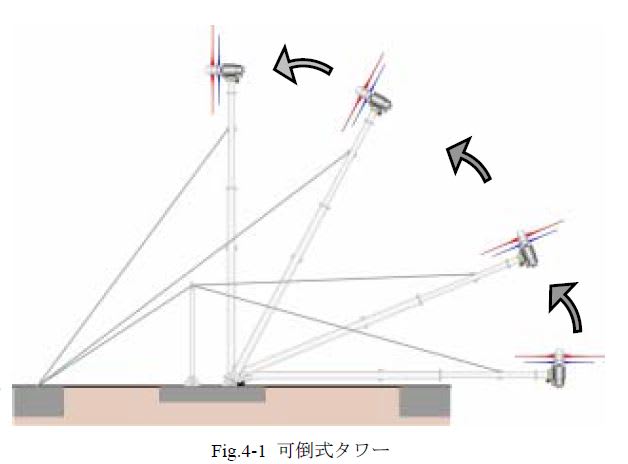
路造成、基礎工事を経て実験サイトを準備した。そこに建立するタワーについては、暴風雨など
から発電機や風車ロータを保護するため(実験用のため防水対策がなされていない)可倒式を採
用する(上図4-1)。
タワーの頂部には風車ロータ(前段風車ロータ径2メートル、翼枚数3枚、後段風車ロータ径1.
33メートル、翼枚数5枚)、二重回転電機子方式二重巻線形誘導発電機(8極3相、同期速度
900min-1、定格出力1.2キロワット)、ヨー駆動機構など重量175kgfを搭載する(図4-
2、4-3)。タワーの設計に際しては、カットアウト風速毎秒25メートルのときに風車ロー
タが回転状態、つまり回転円盤とした場合と、最大風速毎秒60のときに風車ロータが静止状態
を想定して形状を決定。タワーは 下段部(0~5メートル、外径190.7ミリメートル、内径
180.1ミリメートル、安全率14.6) 上段部(5~8メートル、外径139.8ミリメート
ル、内径127.8ミリメートル、安全率7.8)および風向制御機構を備えた発電機ベッドから
なり、地上から3.5メートルと6.5メートルの位置にそれぞれ4方向に合計8本設けた支線ワ
イヤー(亜鉛めっき鋼より線、外径10.5ミリメートル、安全率10.5)によって支持されて
いる。


● フィールド実験方法
前後段風車ロータそれぞれの回転速度は、発電機内に設けた回転速度計で測定される。発電機の
励磁側(2次側)の周波数 f2 はインバータで,電圧 V2 はスライダックによって自由に調整で
きる。出力側(1次側)は、90ワット~2370ワットの間で選択できるランプ負荷に接続さ
れている。風速は、風車ロータに流入する風速を観測するためのものと、フィールド実験場の風
況を観測するものの2つを設置した。両風速計とも風車ロータの回転中心と同じ高さにある。

図4-4に示すように、1次側/2次側の周波数 f1, f2,電圧V1,V2,電流 I1,I2,出力 P1,
P2,前後段風車ロータの回転速度 NF,NR,風速 V の全データは、制御サーキットに集約され1
秒毎に PC に蓄積される。制御サーキットに装備されたタッチパネルでは、これらのデータをリ
アルタイムで確認することや、風力発電機を風の方向に調節するためのヨー制御を行うことがで
きる。安全のため前後段風車ロータにはそれぞれ電磁ブレーキを備えている。

図4-5は、フィールド実験サイトの06年12月28日から07年1月15日までの風況デー
タを10分間毎に平均したものである。観測は風車ロータの回転中心と同じ地上から8メートル
の高さの位置で行った。風速を黒丸で、風向を四角の白抜きで示している。風力発電機が稼動で
きる程度の風速がるとき、風はほぼ270°(北西)の方向から吹いていることがわかる。
● 2次側の周波数と電圧を一定に保った場合の実験
2次側の励磁周波数 f2 と励磁電圧 V2 を一定(f2=60Hz,V2=50V)に保った状態で、ランプ負荷
P1lump が 90W の場合と540W の場合について、フィールド実験結果の一例を図4-6、4-8
に示す[NF,NR,NT:前段風車ロータ(2次側)後段風車ロータ(1次側)および相対回転速度]、
ランプ負荷が大きいと後段風車ロータの回転速度が遅くなる(図4-6)が、1次側周波数 f1
は相対回転速度NT に対応して風速の増加とともに増加する(図4-7)。また、出力も風速と
ともに増加するが,ランプ負荷が大きいほど1 次側からの出力 P1 も高い(図4-8)。
● 車載実験での研究成果
ここで用いた風車ロータはタンデム風車ロータとして好適な姿がわからないまま設計されたもの
である(図4-9)が、前後段径 dF=2000 mm,dR=1330mm,前後段ブレード枚数 ZF=3,ZR=5(1)、
前後段風車ロータ間の軸間距離 l=160 mm である.前後段風車ロータのブレードは、日本の風況
を考慮しV=8 m/s においてMEL012 翼型(2)を用いて設計されている。このとき、前段風車ロータ
は一般的な翼素運動量理論(3)により、ブレードに最適なひねりと翼弦長が与えられている。後
段風車ロータについては経験がないので、前段風車ロータのみについて商用の数値解析コード(C
FX-10)で数値シミュレーションを行い、後段風車ブレードへの流入角を予測し、その流れに対し
最適なひねりを与え、翼弦長は前述と同様な方法で決定された。
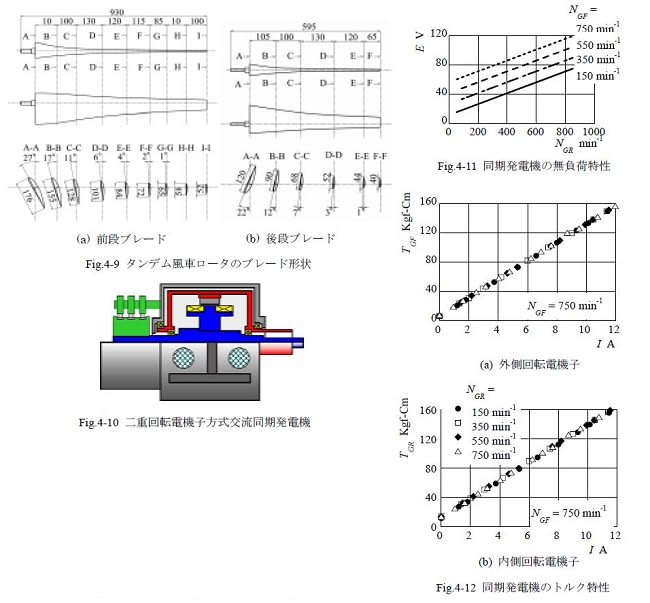
● 内外二重回転電機子方式同期発電機の準備
ここでは車載実験を行うので,系統電力を必要とする誘導発電機が使用できない。そこで、永久
磁石励磁4極三相交流発電機(定格1000W、750×2 min-1、100V、50Hz)を準備した(図4-10)。
ただし、本研究目的に支障はないものの、相反回転方式水力発電ユニット用に製作されたものを
流用しており、本風車ロータとの適合を考えて製作されたものではない。無負荷運転時における
回転速度と誘起電圧 E の関係を図4-11 に示す。
ここに,NGR,NGF はそれぞれ内側および外側回転電機子(R:後段、F:前段風車ロータと連結)
の回転速度であり、回転方向は互いに逆方向(相反回転)である。両回転電機子の回転速度に比
例して誘導電圧E は高くなり、たとえば、内側と外側の相反回転速度が同じ場合(NGR=NGF)の誘
起電圧 E は所望通り、外側が固定子の場合の倍となる。図4-12 はランプ負荷がある場合の誘
起電流I に対する内外回転電機子に作用する相反回転トルクTGR,TGF(回転トルクの方向は逆)
の一例を示したものである。
両回転電機子に作用する回転トルクは回転速度に関係なく誘起電流に比例する。理論上、同一電
流では常に両回転電機子に働く回転トルクは同じであるが、軸受けの摩擦トルクによりI=0 でも
回転トルクが生じ、スリップリングを有する内側回転電機の回転トルクTGR のほうが幾分大きい。
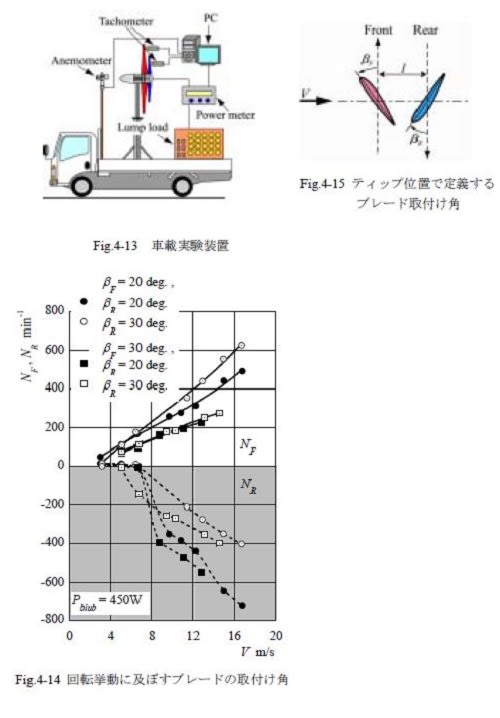
上述の風車ロータと発電機からなるユニットをタワーの上端に設け、図4-13 のようにピックア
ップトラックに搭載した。ここでは、小型独立電源用を意識してダウンウィンド型を採用した。
約1.5 Km の直線道路を一定速度で走行することにより、風洞実験と同様に微風速から強風速ま
で定常的な風速を再現した.このような方法の有効性は既に報告されている。
実験に際しては,前後段ブレード取付け角βF, βR およびランプ負荷 Pbulb をパラメータとし、
風速V,前後段風車ロータ回転速度 NF, NR,発電機の誘起電圧E,誘起電流 I,出力 PG を測定し
た。発電機からの出力は電力計を介してランプ負荷に接続されており、ランプ負荷の大きさはス
イッチにより段階的に変更できる。なお、ランプは電圧と電流によって抵抗が変わるので、ここ
では便宜上、ランプ負荷 Pbulb そのものでデータを整理した。これら全ての測定データはデータ
ロガーに1秒ごとに記録されるが、本報告ではそれらの一定時間平均値で評価する。
● 性能に及ぼすブレード取付け角の影響
図4-14 にランプ負荷 Pbulb=450 W の場合について、ブレード取付け角(図4-15 ティップの
翼弦と周方向が成す角度)を変化させたときの、風速 V に対する前後段風車ロータの回転速度
NF,NR の一例を示す。前段風車ロータは低風速から回転を始めるが、後段風車ロータはなかなか
回転せず、βR=20 deg. 以下では風速 V=7 m/s 以上になって初めて前段風車ロータと逆方向に回
転する。この原因として、前述したように後段風車ロータが駆動する内側回転電機子の機械トル
クが大きいことと、同期発電機特有の永久磁石による磁気力が考えられる。取付け角を大きくす
ると(βR=30 deg.)。回転速度の増加は期待できないものの、低風速での回転トルクを大きく
することができるので、後段風車ロータのカットイン風速を低風速よりにすることができる。
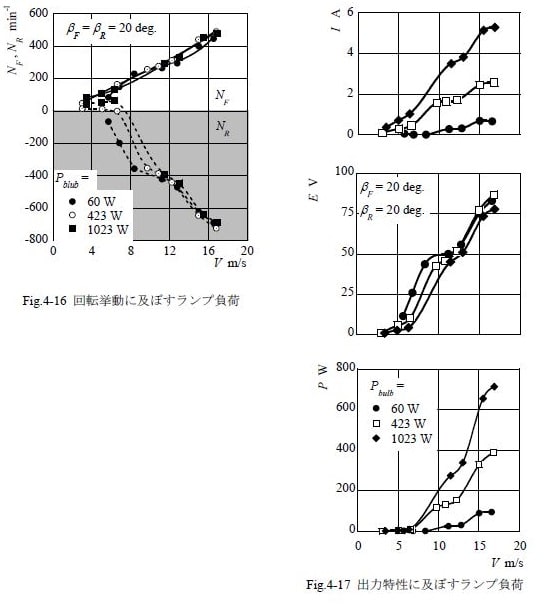
● 性能に及ぼすランプ負荷の影響
ブレードの取付け角をβF=βR=20 deg. とし、ランプ負荷を変化させたときの回転速度を図4-
16 に示す。ランプ負荷が大きい(電流の増加)ほど、上述した磁界の影響が強くなるので、低風
速域の後段風車ロータは前段風車ロータの回転トルクに打ち勝てず。前段風車ロータと同方向回
転する。風速が増すと後段風車ロータの回転トルクも大きくなるので、ランプ負荷によらず相反
回転する。このときの発電特性を図4-17 に示す。相対回転速度に対応した起電力 E が発生し、
風速の増加とともに出力も大きくなる。図中の範囲ではランプ負荷が大きいほど、起電流、出力
とも大きい。
● 発電制御の代替
本風力発電ユニットはもともとブレードのピッチコントロールを必要とせず。出力制御が必要な
系統連系では、それが容易にできる誘導発電機を採用する。しかし、ここでは同期発電機を使用
しているので、出力制御をブレード取付け角で行ってみた(ピッチコントロールに相当)、風速
V=14m/s を定格運転開始風速とし、それより低風速側では最高効率運転、高風速側では出力一定
にしたときの、出力を図4-18 に示す。同図に、βF_βR_Pbulb の値も併記した。この運転挙動は
本風力発電機の着想に沿ったものであり、ブレード形状の好適化により取付け角一定で実現する
のが究極の目標である。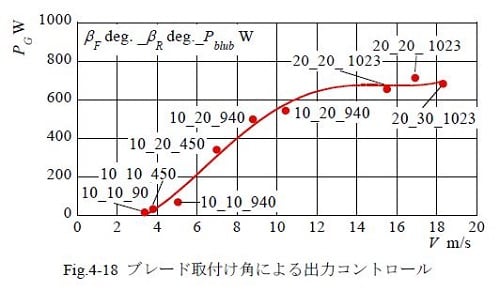
● 後段風車ロータの改良
図4-12 に示した発電機のトルク特性を参考にして、低風速 V=2m/s から設計点風速 V=8m/s ま
で十分な回転トルクを発生するよう。後段風車ロータの改良を試みた。後段風車ロータの設計に
は翼素理論(3)を用い、カットイン風速 V=2m/s で後段回転速度 NR=50min-1、風速 V=8m/s で発
電機の定格回転速度となるように後段回転速度を NR=750min-1 に定めた.カットイン風速におい
ては後段風車ロータに軸方向流入するものとし、風速 V=8m/s では、前述の数値シミュレーショ
ンから得た流入角を用いた。低風速域でのトルクを増加させるために、翼弦長をハブ側からティ
ップまで150mm 一定とし、ブレードのハブ側から4分の3のひねりを大きくする。このブレード
により,着想通り低風速から、後段風車ロータを駆動でき、低風速域から高出力になると思われ
る。
タンデムロータ型インテリジェント風力発電ユニットの実用化に向け,従来の設計法を流用した
風車ロータからなるプロトタイプを用いて車載試験を実施した。タンデム風車ロータとしての設
計法を確立するため、風洞による風車ロータ開発を行っているが、前後段風車ブレードの最適マ
ッチングの必要性が明らかとなった。系統連系を目指す場合、別途開発を進めている二重回転電
機子方式二重巻線型誘導発電機とタンデム風車ロータとの的確な連携プレーにより、発生する電
気を高品質に保つことができるので、これに関しても制御系を含めて研究開発を進めている(現
状にういては不詳)。

【作ってみよう超高性能自律分散型風力発電システム】

JP 2016-118170 A 2016.6.30
【符号の説明】
1 風力発電用垂直軸型風車 2 支柱 3 固定部 4 軸受部 10 回転体 12 円筒部
12' 円筒部フレーム 13 翼 14 翼支持腕 14' 翼支持腕フレーム 16 シャフト
120 中央部カバー 121 上部カバー 122 下部カバー 123 頂板 124 中板
125 底板 150 ガイドローラー 200、201、203 翼部材 204 ボトムカバー
210 筒状側壁部 211 一方の開口部 212 他方の開口部 214 補強部材 215 フラ
ンジ部 216 筒状立上り部 217 板状部材 218 翼桁用開口部 220、222 連結孔
250 切欠き部 270 翼桁 280 翼取付けステイ 281 貫通孔 282 連結部
今回まで風力発あ電装置(システム)の現況を俯瞰してきた。ここでは中間的な、わたし(たち)
)が理想とする高性能な自律分散型風力発電システムの目標仕様(特性)を箇条書きにしてみよ
う。参考として、株式会社CNOパワーソリューションズの垂直翼揚力型風車(DM-00-300型)
を参考にする。勿論、バイオミミックリなブレード表面は流体力学数値解析。
● システムの特徴
低騒音静粛型:「風切り ノイズ」や「低周波騒音」を抑制/騒音測定:□db以下 自己起動型:360度どの方向からの風も受け止め、わずか風速1 m/s以下の微風から自ら回転を開始 長時間回転維持型:風がやんでも長時間回転を維持:□s超 自己ブレーキ型:風車が一定の回転数に達するとトルクを抑制。強風域でも過回転防止し
安全維持 メンテナンスフリー型:簡単に修理できる 長期性能維持型:□年保証(保証前提:精査後) タービンユニット拡張型:ユニットを接続することで簡単に出力逓増可能:最大□ユニット
● システム仕様
タイプ:垂直翼揚力型風車 ブレード数:垂直翼揚力型:□翼数(最適設計) 最大瞬間出力:300W超(12m/s超) 最大出力回転数:300rpm超(12m/s超) 回転開始速度:1m/s以下 カットイン風速速度:2.5m/s以下 外形寸法:□m×□m×□m(回転翼+内蔵機関一体外形) 直径:1200㎜以下(=ブレード長) 質量:80kg以下 取付フランジ:260Φmm以下 ブレード材質:特殊強化プラスチックなど ボディ素材:鉄、ステンレス、アルミニウム、プラスチック 塗装:□処理□塗装 発電タイプ:三相コアレス発電機、誘導発電機、同期発電機 コントロールシステム:SWT仕様 パワーアシスト:無 通信機能:有 ブレーキ・ロック方式:回生電磁ブレーキ方式内臓、磁気及び機械式ブレーキ オプション:出力インバーター/バッテリー/表示器ユニット/ 標準価格:□万円_□人家族/世帯(□kw/d) 雷サージ対策:殊強化プラスチックに銅メッシュ層を挿入 ● 今夜の一曲
● 今夜の一曲
エルガー弦楽四重奏曲 / E.Elgar String Quartet in E minor Op.83, 1st mvt
1918年、ヴァイオリンソナタ ホ短調 作品82の完成後に、ピアノ五重奏曲イ短調 作品84ととも
に着手された。ピアノ五重奏曲の完成は翌1919年になったが、弦楽四重奏曲は1918年末に完成。
エルガーには1907年にも弦楽四重奏曲を作曲する計画があったが、交響曲第1番の作曲が優先さ
れたためにこちらは放置された。1918年に作曲されたのは、この時の構想とは異なる弦楽四重奏
曲。
初演は1919年5月21日、ロンドンのウィグモア・ホールにおいて、ピアノ五重奏曲とともに同じ
演奏者、アルバート・サモンズとW.H.リードのヴァイオリン、レイモンド・ジェレミーのヴィオ
ラ、フェリックス・サルモンドのチェロにより行われる。エルガーの妻キャロライン・アリスは
この曲の第2楽章を気に入っていて、その葬儀の時にも演奏されている。